[Top][All Lists]
[Date Prev][Date Next][Thread Prev][Thread Next][Date Index][Thread Index]
[Paparazzi-devel] UAV position in paparazzi GCS
|
From: |
Henri Pierre |
|
Subject: |
[Paparazzi-devel] UAV position in paparazzi GCS |
|
Date: |
Mon, 25 Jun 2012 17:51:25 +0200 |
Hello Paparazzi.
I'm running a simulation with nps.
IvyProbe shows this line :
QUAD_SIM_NPS sent '122 GPS_INT -271074547 -427855869 387639319 6564807 -21355311 7923901 99 -64 -25 26 0 0 0 0 0 3 '
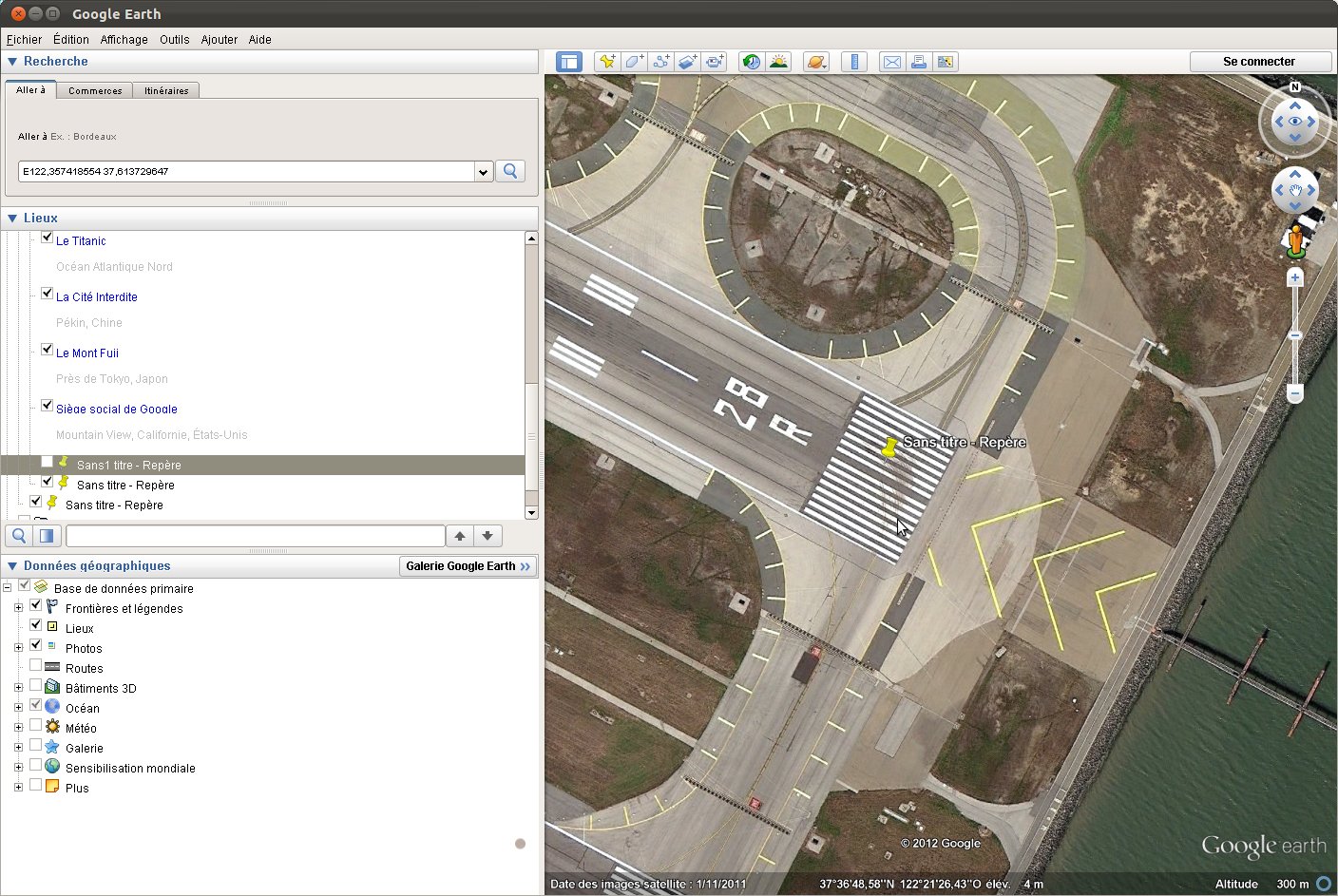
6564807 and -21355311 provides lat/long which are :
- lat : 6564807 * 0.0000057296 = 37,613718187°
- long : 21355311 * 0.0000057296 = 122,357389906°
If I put those coordinates in google earth, this leads to one of the joined screen captures while the paparazzi gcs
shows the uav elsewhere (not far but elsewhere) (see other screen capture).
On the gcs screen you can see the uav position corresponding to the above message. The "home" waypoint has been
moved to the same coordinates than the uav using the above coordinates. i can't understand why home waypoint
and uav are not superimposed.
I did some outdoors tests that show that the uav is correctly displayed in paparazzi GCS... This makes me think that
coordinates in the GPS_INT are wrong.
Does that mean something to you ?
Which message does the gcs use to put the uav on the map ?
Regards
Henri
 earth.jpg
earth.jpg
Description: JPEG image
gcs.jpg
Description: JPEG image
- [Paparazzi-devel] UAV position in paparazzi GCS,
Henri Pierre <=
{kind=link}
{kind=link}