-Christophe
On Tue, May 17, 2011 at 10:47 AM, Prof. Dr.-Ing. Heinrich Warmers <address@hidden> wrote:
Hi,
i think one of the problem is the fact that in the cross product of a=W x V (rates cross speed over ground) only the
yaw rates are taken into account to correct the gravitation vector to fly long time curves.
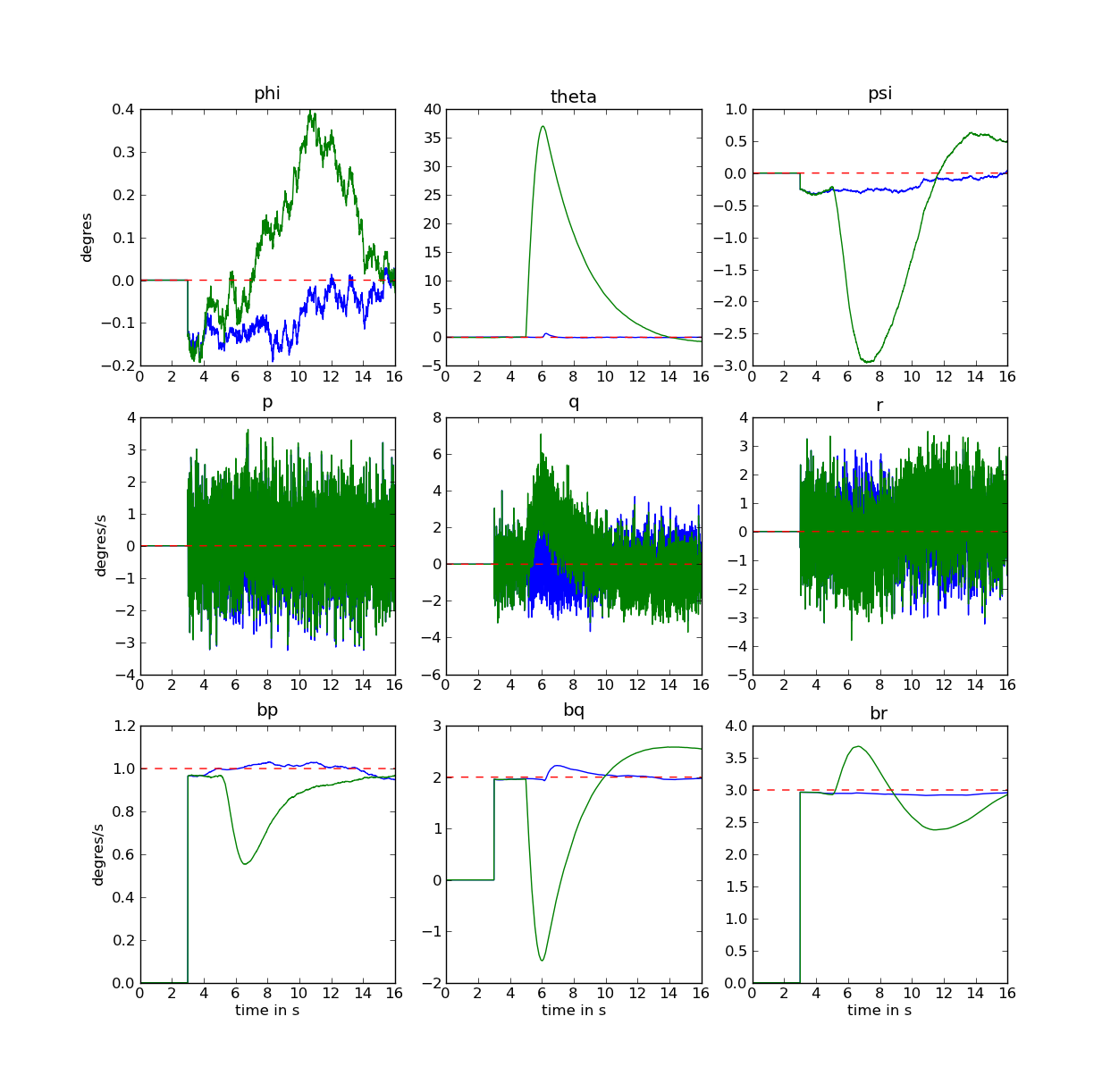
By the way the acceleration time is only a few seconds. In this time it is impossible to have large errors in the 35° range
generated by the bias of the rate sensors. We had no problems with automatic hand starts.
It may be help, if you wait for about 2 minutes after power on for getting the working point of the feedback control system.
The zero values for the rate must be found very exact (in the range of 1LSB).
Regards
Heinrich
antoine drouin schrieb:
same scenario, but this time, i also made the filter without heuristic use the magnetometer for yaw only ( I believe that is what arduimu does ). You notice that the error is even worse ( up to 35 degres now). On Mon, May 16, 2011 at 3:55 PM, Gautier Hattenberger <address@hidden> wrote:Hi, The arduimu_basic code has some special tricks to try to detect high acceleration when launching (high throttle, low speed) and prevents the imu from using accelerometers. I'm still removing some bugs, but it seems to work (although it's only a stupid hack in the end...). Antoine's filter seems to be a bit clever than that. Gautier On 16/05/2011 13:35, Lange Dennis (langede0) wrote:Hi We're using the arduino-basic code and the Kalman Filter for GPS-Data Dennis Am 14.05.2011 05:15, schrieb antoine drouin: Hi Dennis What filter are you using ? On Sat, May 14, 2011 at 12:38 AM, Lange Dennis (langede0) <address@hidden> wrote: Hi all We would like to develop an autonomous Bungee-Takeoff. We have written a routine that actually works. In the first seconds of the start it looks very good. But then the UAV starts to decline again. But the log file sayd that the UAV wants to climb all time. And we also saw that the PFD did not show the right position. So we believe that the IMU has an error because of the acceleration during the takeoff. We also tried the BungeeTakeoff from the OSAM-Team>> same problem Has anyone else had this problem? Or does someone have a solution? We considered to control the angle of attack with an extra sensor during takeoff. Can it work? Thanks in advance Dennis _______________________________________________ Paparazzi-devel mailing list address@hidden https://lists.nongnu.org/mailman/listinfo/paparazzi-devel _______________________________________________ Paparazzi-devel mailing list address@hidden https://lists.nongnu.org/mailman/listinfo/paparazzi-devel _______________________________________________ Paparazzi-devel mailing list address@hidden https://lists.nongnu.org/mailman/listinfo/paparazzi-devel_______________________________________________ Paparazzi-devel mailing list address@hidden https://lists.nongnu.org/mailman/listinfo/paparazzi-devel>
_______________________________________________
Paparazzi-devel mailing list
address@hidden
https://lists.nongnu.org/mailman/listinfo/paparazzi-devel